 Dec 1999, M. Honegger
Dec 1999, M. Honegger
Nanotechnology is a key issue in today's and tomorrow's development of advanced products. Soon new tools will be needed to automatically handle and assemble micro-sized objects with nanometer precision, or simply to give human beings the capability of operating in these tiny dimensions. In view of emerging applications in this field, the Swiss Federal Institute of Technology, Zurich, decided to focus on an interdisciplinary project with the theme "Nanorobotics", i.e. automated handling of microparts with nanometer resolution. The goal was to design and build a nanorobot (see figures) with the following specifications:
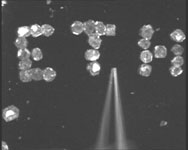
The system is composed of a robot operating under a light microscope or a stereo SEM. A stereo vision module and additional sensors (e.g. laser interferometer) are used to locate the objects and the robot gripper. This information is sent to the main control computer which will move the robot in an appropriate way. The commands are given by a human operator through a dedicated user-interface. The handling of small octahedral shaped diamonds with a size of about 50 micrometer is the benchmark that has been specified. Orientation and position must be precisely controlled.
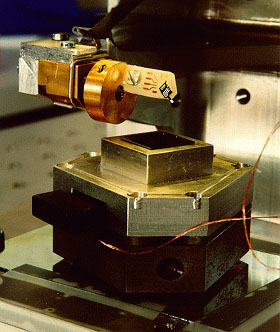
Handling microparticles with high precision (10 nm) within a large workspace (1 cm3) requires new actuation principles and kinematic chains. To achieve this acuracy, piezo-driven stepping mechanisms like Inertial Drives or Inch-Worms seem to be well suited. They provide both an excellent mechanical resolution due to the frictionless piezo-deformation and a theoretically infinite workspace by performing one step after each other.
The focus of this research was the incorporation of single actuators to a multi-degree-of-freedom structure. As the main limiting factors for micro positioning are stick-slip and vibrations. Parallel structures with elastic joints (i.e. no static friction) are the most promising way to achieve precise spatial micro positioning. Four degrees of freedom (two translations and two rotations) out of the NanoRobot's eight have been implemented with inertial drives developed within this project.
A small 3 dof industrial robot with piezo-actuators:
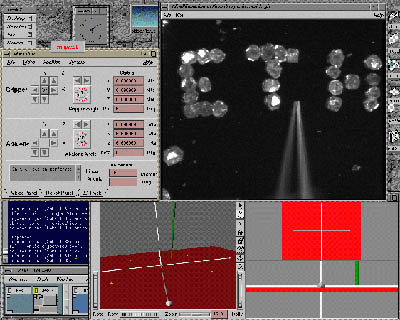
Handling objects in the micro world presents new challenges and possibilities not present in the macroworld. Therefore, a customized set of visualization and manipulation tools is required for man machine interaction. A graphical user interface for a robot capable of high precision movements operating in the micro world has been developed. The operator of the system interacts with the microworld with a set of visualization and manipulation tools. The visualization tools are:
The manipulation tools are:
Institute of Robotics Homepage
Dec 1999, M. Honegger